Devin Carroll, a doctoral candidate in the School of Engineering and Applied Sciences, is designing a modular robot called StickBot, which may be adapted for rehabilitation use in global public health settings.
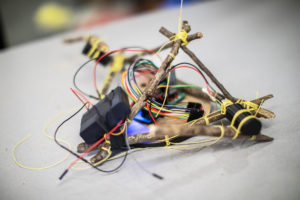
In late summer, just as the leaves were starting to crisp and curl in the heat, Devin Carroll walked out of his apartment, looked on the ground, and picked up a couple of sticks that he thought might work for his robot. About half an inch thick and the length of an adult hand, he stripped the three sticks of their bark and lashed them with string to StickBot, a modular robot composed of circuitry, actuators, a microcontroller, and a motor driver.
Powered by four AA batteries, connected by a maze of wires and blinking lights, StickBot’s wooden arms now thump up and over, powering the robot across the table at Penn’s General Robotics, Automation, Sensing & Perception (GRASP) Lab, where Carroll is a Ph.D. candidate in the School of Engineering and Applied Sciences.
Controlling the robot using an app he designed, Carroll shows how StickBot can pivot from using the sticks as legs in “crawler mode,” to using them as arms. In “grasper mode,” the sticks are attached to a controller plate on one side to form a hinge joint while moving with their free end to hold a cup upright.
Rather than a static, singular invention, StickBot is an idea, a flexible system that can be reconfigured in a variety of ways. A modular robot, StickBot’s components can be added, adjusted, and discarded as needed.
Read the full story in Penn Engineering Today.
This article features quotes from Michelle Johnson, Associate Professor in Physical Medicine and Rehabilitation in the Perelman School of Medicine and in Bioengineering in the School of Engineering and Applied Sciences, and Director of the Rehabilitation Robotics Lab.