Left to right: Hong-Huy Tran, Chrissie Jaruchotiratanasakul, Manali Mahajan (Photo Courtesy of CiPD)
The Center for Innovation and Precision Dentistry (CiPD), a collaboration between Penn Engineering and Penn Dental Medicine, has partnered with Wharton’s Mack Institute for Innovation Management on a research project which brings robotics to healthcare. More specifically, this project will explore potential uses of nanorobot technology for oral health care. The interdisciplinary partnership brings together three students from different Penn programs to study the commercialization of a new technology that detects and removes harmful dental plaque.
“Our main goal is to bring together dental medicine and engineering for out-of-the-box solutions to address unresolved problems we face in oral health care,” says Hyun (Michel) Koo, Co-Founding Director of CiPD and Professor of Orthodontics. “We are focused on affordable solutions and truly disruptive technologies, which at the same time are feasible and translatable.”
Students test the GaitMate harness and structure as a tool to help recovering patients walk.
Penn students have been building their knowledge and hands-on experience in places all over the world through Penn Global Seminars. Last May, “Robotics and Rehabilitation” brought Penn students back to the tropical island of Jamaica to collaborate with local university students and make an impact on recovery and quality of life for patients in Kingston and beyond.
Course leaders Camillo Jose (CJ) Taylor, Raymond S. Markowitz President’s Distinguished Professor in Computer and Information Science (CIS), and Michelle J. Johnson, Associate Professor of Physical Medicine and Rehabilitation at the Perelman School of Medicine and Associate Professor in Bioengineering (BE) and Mechanical Engineering and Applied Mechanics (MEAM) at Penn Engineering, brought the first cohort of students to the island in 2019.
“CJ and I are both Jamaicans by birth,” says Johnson. “We were both excited to introduce the next generation of engineers to robotics, rehabilitation and the process of culturally sensitive design in a location that we are personally connected to.”
As they built relationships with colleagues at the University of West Indies, Mona (UWI, Mona) and the University of Technology, Jamaica (UTECH), both Johnson and Taylor worked to tie the goals of the course to the location.
“In the initial iteration of the course, our goal was to focus on the applications of robotics to rehabilitation in a developing country where it is necessary to create solutions that are cost effective and will work in under-resourced settings,” says Taylor.
Taylor and Johnson wanted to make the course a regular offering, however, due to COVID-related travel restrictions, it wasn’t until last spring that they were able to bring it back. But when they did, they made up for lost time and expanded the scope of the course to include solving health problems for both people and the environment.
“While we started with a focus on people, we realized that the health and quality of life of a community is also impacted by the health of the environment,” says Taylor. “Jamaica has rich terrestrial and marine ecosystems, but those resources need to be monitored and regulated. We ventured into developing robotics tools to make environmental monitoring more effective and cost-friendly.”
One of those student-invented tools was a climate survey drone called “BioScout.”
“Our aim was to create a drone to monitor the ecosystem and wildlife in Jamaica,” says Rohan Mehta, junior in Systems Science and Engineering. “We wanted to help researchers and rangers who need to monitor wildlife and inspect forest sectors without entering and disturbing territories, but there were no available drones that met all of the following criteria necessary for the specific environment: affordable, modular, water-resistant and easy to repair. So we made our own.”
Another team of students created a smart buoy to reduce overfishing. The buoy was equipped with an alarm that goes off when fishermen get too close to a no-fishing zone.
Five other student teams dove into projects aligned to the original goals of the course. Their devices addressed patients’ decreased mobility due to diabetes, strokes and car accidents. These projects were sponsored by the Sir John Golding Rehabilitation Center.
One of which, the GaitMate, was engineered to help stroke patients who had lost partial muscle control regain their ability to walk.
“We developed a device that supports a patient’s weight and provides sensory feedback to help correct their form and gait as they walk on a treadmill, ultimately enhancing the recovery process and providing some autonomy to the patient,” says Taehwan Kim, senior in BE. “The device is also relatively cheap and simple, making it an option for a wide variety of physical therapy needs in Jamaica and other countries.”
Biofilms—structured communities of microorganisms that create a protective matrix shielding them from external threats, including antibiotics—are responsible for about 80% of human infections and present a significant challenge in medical treatments, often resisting conventional methods.
In a Q&A with Penn Today, Hyun (Michel) Koo of the School of Dental Medicine and Edward Steager of the School of Engineering and Applied Science at Penn discuss an innovative approach they’ve partnered on: the use of small-scale robotics, microrobots, to offer a promising solution to tackle these persistent infections, bringing new capabilities and precision to the field of biomedical engineering.
Q: What is the motivation behind opting for tiny robots to tackle infections?
Koo: Treating biofilms is a broad yet unresolved biomedical problem, and conversely, the strategies for tackling biofilms are limited for a number of reasons. For instance, biofilms typically occur on surfaces that can be tricky to reach, like between the teeth in the oral cavity, the respiratory tract, or even within catheters and implants, so treatments for these are usually restricted to antibiotics (or antimicrobials) and other physical methods reliant on mechanical disruption. However, this touches on the problem of antimicrobial resistance: targeting specific microorganisms present in these structures is difficult, so antibiotics often fail to reach and penetrate the biofilm’s protective layers, leading to persistent infections and increased risk of antibiotic resistance.
We needed a way to circumvent these constraints, so Ed and I teamed up in 2017 to develop new, more precise and effective approaches that leverage the engineers’ ability to generate solutions that we, the clinicians and life science researchers, identify.
Hyun (Michel) Koo is a professor in the Department of Orthodontics and in the divisions of Pediatric Dentistry and Community Oral Health and the co-founder of the Center for Innovation & Precision Dentistry in the School of Dental Medicine at the University of Pennsylvania. He is a member of the Penn Bioengineering Graduate Group.
Edward Steager is a senior research investigator in Penn’s School of Engineering and Applied Science.
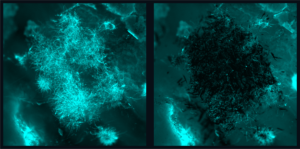
Candida albicans is a species of yeast that is a normal part of the human microbiota but can also cause severe infections that pose a significant global health risk due to their resistance to existing treatments, so much so that the World Health Organization has highlighted this as a priority issue. The picture above shows a before (left) and after (right) fluorescence image of fungal biofilms being precisely targeted by nanozyme microrobots without bonding to or disturbing the tissue sample. (Image: Min Jun Oh and Seokyoung Yoon)
Infections caused by fungi, such as Candida albicans, pose a significant global health risk due to their resistance to existing treatments, so much so that the World Health Organization has highlighted this as a priority issue.
Although nanomaterials show promise as antifungal agents, current iterations lack the potency and specificity needed for quick and targeted treatment, leading to prolonged treatment times and potential off-target effects and drug resistance.
“Candida forms tenacious biofilm infections that are particularly hard to treat,” Koo says. “Current antifungal therapies lack the potency and specificity required to quickly and effectively eliminate these pathogens, so this collaboration draws from our clinical knowledge and combines Ed’s team and their robotic expertise to offer a new approach.”
The team of researchers is a part of Penn Dental’s Center for Innovation & Precision Dentistry, an initiative that leverages engineering and computational approaches to uncover new knowledge for disease mitigation and advance oral and craniofacial health care innovation.
For this paper, published in Advanced Materials, the researchers capitalized on recent advancements in catalytic nanoparticles, known as nanozymes, and they built miniature robotic systems that could accurately target and quickly destroy fungal cells. They achieved this by using electromagnetic fields to control the shape and movements of these nanozyme microrobots with great precision.
“The methods we use to control the nanoparticles in this study are magnetic, which allows us to direct them to the exact infection location,” Steager says. “We use iron oxide nanoparticles, which have another important property, namely that they’re catalytic.”
Other authors include Min Jun Oh, Alaa Babeer, Yuan Liu, Zhi Ren, Zhenting Xiang, Yilan Miao, and Chider Chen of Penn Dental; and David P. Cormode and Seokyoung Yoon of the Perelman School of Medicine. Cormode also holds a secondary appointment in Bioengineering.
This research was supported in part by the National Institute for Dental and Craniofacial Research (R01 DE025848, R56 DE029985, R90DE031532 and; the Basic Science Research Program through the National Research Foundation of Korea of the Ministry of Education (NRF-2021R1A6A3A03044553).
Each year, the the Department of Bioengineering seeks exceptional candidates to conduct summer research in bioengineering with the support of two scholarships: the Abraham Noordergraaf Student Summer Bioengineering Research Fund and the Blair Undergraduate Research Fund in the Department of Bioengineering. These scholarships provide a living stipend for students to conduct research on campus in a Penn research lab under the mentorship of a faculty member. The Abraham Noordergraaf Student Summer Bioengineering Research Fund provides financial support for undergraduate or graduate summer research opportunities in bioengineering with a preference for study in the area of cardiovascular systems. Dr. Noordergraaf, who died in 2014, was a founding member and first chair of Penn Bioengineering. The Blair Undergraduate Research Fund in the Department of Bioengineering supports three to five undergraduate research scholars each year with the support of Dr. James C. Blair II. After a competitive round of proposals, the following six scholars were chosen for the Summer 2022 semester. Keep reading below for the research abstracts and bios of the awardees.
The Blair Undergraduate Research Fund in the Department of Bioengineering (Blair Scholars)
Ella Atsavapranee
Student: Ella Atsavapranee (BE Class of 2023)
PI: Michael J. Mitchell, J. Peter and Geri Skirkanich Assistant Professor of Innovation, Bioengineering
“Lipid nanoparticle-mediated delivery of RAS protease to inhibit cancer cell growth”
Mutations in RAS, a family of proteins found in all human cells, drive a third of cancers, including many pancreatic, colorectal, and lung cancers. However, there are still no therapies that can effectively prevent RAS from causing tumor growth. Recently, a protease was engineered to specifically degrade active RAS, offering a promising new tool for treating these cancers. However, many protein-based therapies still cannot be effectively delivered to patients. Lipid nanoparticles (LNPs), which were used in the Pfizer-BioNTech and Moderna COVID-19 vaccines, have emerged as a promising platform for safe and effective delivery of both nucleic acids and proteins. We formulated a library of LNPs using different cationic lipids. We characterized the LNPs by size, charge, and pKa, and tested their ability to deliver fluorescently labeled protease. The LNPs were able to encapsulate and deliver a RAS protease, successfully reducing proliferation of colon cancer cells.
Ella is a senior from Maryland studying bioengineering and chemistry. She works in Dr. Michael Mitchell’s lab, developing lipid nanoparticles to deliver proteins that reduce cancer cell proliferation. She has also conducted research on early-stage cancer detection and therapy monitoring (at Stanford University) and drug delivery across the blood-brain barrier for neurodegenerative diseases (at University of Maryland). She is passionate about translational research, science communication, and promoting diversity in STEM.
Chiadika Eleh
Student: Chiadika Eleh (BE and CIS Class of 2024)
PI: Eric J. Brown, Associate Professor of Cancer Biology, Perelman School of Medicine
“Investigating Viability in ATR and WEE1 Inhibitor Treated Ovarian Cancer Cells”
High-grade serous ovarian cancers (HGSOCs) are an aggressive subtype of ovarian cancer, accounting for up to 80% of all ovarian cancer-related deaths. More than half of HGSOCs are homologous recombination deficient; thus, they lack a favorable response when treated with common chemotherapeutic trials. Therefore, new treatment strategies must be developed to increase the life expectancy and quality of life of HGSOC patients. To address the lack of effective treatment options, the Brown Lab is interested in combining ATR and WEE1 inhibition (ATRi/WEE1i) to target HGSOC cells. It has previously been shown that low-dose ATRi/WEE1i is an effective treatment strategy for CCNE1-amplified ovarian cancer-derived PDX tumors (Xu et al., 2021, Cell Reports Medicine). Therefore, the next step is to characterize the HGSOC-specific response to ATRi/WEE1i treatment. This project aims to characterize the viability phenotype of ovarian cancer (OVCAR3) cells in the presence of ATRi/WEE1i in both single and combination treatments. With further research, Eleh hopes to prove the hypothesis low-dose combination ATRi/WEE1i treatment will result in the synergistic loss of viability in OVCAR3 cells. This goal will be achieved through the treatment of OVCAR3 cells with ranging doses of ATRi and Wee1i over 24 and 48 hour time intervals. We hope that this data will help set a treatment baseline that can be used for all OVCAR30-based viability experiments in the future.
Chiadika Eleh is a Bioengineering and Computer Science junior and a member of Penn Engineering’s Rachleff Scholar program. As a Blair Scholar, she worked in Dr. Eric Brown’s cancer biology lab, where she studied cell cycle checkpoint inhibitors as a form of cancer treatment.
“Tbc1d2b regulates vascular formation during development and tissue repair after ischemia”
The mechanisms behind endothelial cells forming blood vessels remains unknown. We have identified Tbc1d2b as a protein that is integral to the regulation of vascular formation. In order to investigate the role of Tbc1d2b in tubule formation, fibrin gel bead assays will be conducted to evaluate how the presence of Tbc1d2b is required for angiogenesis. Fibrin gel bead assays simulate the extracellular matrix environment to support the in vitro development of vessels from human umbilical vein endothelial cells (HUVEC) coated on cytodex beads. In order to confirm the success of angiogenesis, immunostaining for Phalloidin and CD31 will be conducted. After confirmation that fibrin gel bead assays can produce in vitro tubules, sgRNA CRISPR knockout of Tbc1d2b will be performed on HUVEC cells which will then be used to conduct more fibrin gel bead assays. We hypothesize that HUVEC with the Tbc1d2b knockout phenotype will be unable to form tubules while wild type HUVEC will be able to.
Gloria Lee is a rising senior studying Bioengineering and Physics in the VIPER program from Denver, Colorado. Her research in Dr. Yi Fan’s lab focuses on the role that proteins play in cardiovascular tubule formation.
Abraham Noordergraaf Student Summer Bioengineering Research Fund (Noordergraaf Fellows)
Gary Lin
Student: Gary Lin (Master’s in MEAM Class of 2023)
PI: Michelle J. Johnson, Associate Professor in Physical Medicine and Rehabilitation, Perelman School of Medicine, and in Bioengineering
“Development and Integration of Dynamically Modulating Control Systems in the Rehabilitation Using Community-Based Affordable Robotic Exercise System (Rehab CARES)”
As the number of stroke patients requiring rehabilitative care continues to increase, strain is being put onto the US health infrastructure which already has a shortage of rehabilitation practitioners. To help alleviate this pressure, a cost-effective robotic rehabilitative platform was developed to increase access to rehabilitative care. The haptic TheraDrive, a one-degree of freedom actuated hand crank that can apply assistive and resistive forces, was modified to train pronation and supination at the elbow and pinching of the fingers in addition to flexion and extension of the elbow and shoulder. Two controllers were created including an open-loop force controller and a closed-loop proportional-integral (PI) with adaptive control gains based on subject performance in therapy-game tasks as well as galvanic skin response. Stroke subjects (n=11) with a range of cognitive and motor impairment completed 4 therapy games in both adaptive and non-adaptive versions of the controllers (n=8) while measuring force applied on the TheraDrive handle. Resulting normalized average power versus Upper Extremity Fugl-Meyer (UE-FM) and Montreal Cognitive Assessment (MoCA) correlation analyses showed that power was strongly correlated with UE-FM in 2 of the conditions and moderately correlated with the other 6 while MoCA was moderate correlated to 2 of the conditions and weakly correlated to the rest. Mann-Whitney U-tests between adaptive and non-adaptive versions of each therapy game showed no significant differences with regards to power between controller types (p<0.05).
Gary is a master’s student in the School of Engineering studying Mechanical Engineering and Applied Mechanics with a concentration in Robotic and Mechatronic systems. His research primarily focuses on developing affordable rehabilitation robotics for use in assessment and game-based therapies post neural injury. Many of his interests revolve around the design of mechatronic systems and the algorithms used to control them for use in healthcare spaces.
Priya Shah
Student: Priya Shah (BE Class of 2024)
PI: Alex J. Hughes, Assistant Professor in Bioengineering
“Optogenetic Control of Developing Kidney Cells for Future Treatment of End-Stage Renal Disease”
This project sought to build from prior research in the Hughes Lab on the geometric and mechanical consequences of kidney form on cell and tissue-scale function. While the developmental trajectory of the kidney is well understood, little is currently known about many factors affecting nephron progenitor differentiation rate. Insufficient differentiation of nephron progenitor cells during kidney formation can result in lower nephron number and glomerular density, which is a risk factor for progression to end-stage renal disease later in life. Prior studies indicated that the amount of nephron differentiation – and thus function of the adult kidney – is correlated to the packing of ureteric tubule tips present at the surface of the kidney. Building off of research conducted in the Bugaj Lab, we found that inserting an optogenetic construct into the genome of human embryonic kidney (HEK) cells allowed us to manipulate the contraction of those cells through exposing them to blue light. Manipulating the contraction of the cells allows for the manipulation of the packing of ureteric tubule tips at the kidney surface. We used a lentiviral vector to transduce HEK293 cells with the optogenetic construct and witnessed visible contraction of the cells when they were exposed to blue light. Future work will include using CRISPR-Cas9 to introduce the optogenetic construct into IPS cells.
Priya is a junior studying bioengineering and had the opportunity to work on manipulating developing kidney cells using an optogenetic construct in the Hughes Lab this summer. She is thrilled to continue this research throughout the coming school year. Outside of the lab, Priya is involved with the PENNaach dance team and the Society of Women Engineers, as well as other mentorship roles.
Cosette Tomita
Student: Cosette Tomita (Master’s in MEAM Class of 2023)
“Expression and Characterization of an Anti-Aβ42 scFv”
Background: Amyloid Beta (Aβ42) fibrils contribute to the pathology of Alzheimer’s Disease. Numerous monoclonal antibodies have been developed against Aβ42. In this study we have designed and expressed a short chain variable fragment specific to Aβ42 (Anti-Aβ42 scFv). To characterize our anti-Aβ42 scFv we have performed structural analysis using transmission electron microscopy (TEM) and binding kinetics using microscale thermophoresis (MST) compared to commercially available antibodies 6E10, Aducanumab, and an IgG isotype control. The goal of this study is to determine if labeling densities and binding constants for Aducanumab and anti-Aβ42 scFv are not significantly different.
Method: To characterize Aβ42 fibril associated antibodies we used negative stain TEM. Aβ42 fibrils were stained on a glow discharged copper grid, and incubated with gold conjugated anti-Aβ42 scFv, 6E10—which binds all Aβ species, aducanumab, or IgG isotype control. Labeling densities were calculated as the number of fibril-associated gold particles per 1 μm2 for each image. Next, we used microscale thermophoresis determine the binding kinetics. Antibodies or anti-Aβ42 scFv were labeled with Alexa Fluor-647 and unlabeled Aβ42 was titrated in a serial dilution over 16 capillaries. The average fluorescence intensity was plotted against the antibody or scFv concentration and the curves were analyzed using the GraphPad Prism software to calculate the dissociation constant (KD) values.
Results: We found a significant difference, tested with a one-way ANOVA (P <0.0001), in gold particle associated Aβ fibrils per 1 μm2 between anti-Aβ42 scFv, 6E10, aducanumab, and IgG isotype control. Further analysis of aducanumab and 6CO3 with unpaired student t-test indicates significant differences in fibril associated gold particles between aducanumab vs. 6E10 (P=0.0003), Aducanumab vs. Isotype control (P <0.0001), anti-Aβ42 scFv vs 6E10 (p=0.0072), and anti-Aβ42 scFv vs Isotype Control (P=0.0029) with no significant difference in labeling densities between Aducanumab and anti-Aβ42 scFv. The expected KD values from MST were 1.8μM for Aducanumab and anti-Aβ42 scFv, 10.3nM for 6E10 and no expected binding for the isotype control. The experimental KD values for anti-Aβ42 scFv and 6E10 are 0.1132μM and 1.467μM respectively. The KD value for Isotype control was undetermined, as expected, however, the KD for Aducanumab was undetermined due to suboptimal assay conditions. Due to confounding variables in the experimental set up such as the use of Aβ1-16 compared to Aβ42 and the use of different fluorophores—5-TAMRA, Alexa Fluor 647 or FITC— the experimental KD values were off by several orders of magnitude.
Conclusion: We have illustrated similar labeling densities between Aducanumab and our anti-Aβ42 scFv. In the future, we will further optimize the MST assay conditions and compare the KD values obtained by MST with other techniques such as surface plasma resonance.
Cosette was born and raised in Chicago land area. Go Sox! She attended University of Missouri where she majored in Chemistry and Biology. She synthesized sigma-2 radiotracers and developed advanced skills in biochemical techniques in Dr. Susan Lever’s lab. After graduation, she moved to NJ to work at Lantheus, a radiopharmaceutical company. She missed academia and the independence of program and project development, so she came to work at the Penn Cyclotron facility before entering the Bioengineering master’s program.
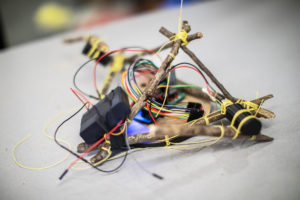
Devin Carroll, a doctoral candidate in the School of Engineering and Applied Sciences, is designing a modular robot called StickBot, which may be adapted for rehabilitation use in global public health settings.
StickBot in walking mode, using the sticks as legs to propel itself across the table.
In late summer, just as the leaves were starting to crisp and curl in the heat, Devin Carroll walked out of his apartment, looked on the ground, and picked up a couple of sticks that he thought might work for his robot. About half an inch thick and the length of an adult hand, he stripped the three sticks of their bark and lashed them with string to StickBot, a modular robot composed of circuitry, actuators, a microcontroller, and a motor driver.
Controlling the robot using an app he designed, Carroll shows how StickBot can pivot from using the sticks as legs in “crawler mode,” to using them as arms. In “grasper mode,” the sticks are attached to a controller plate on one side to form a hinge joint while moving with their free end to hold a cup upright.
Rather than a static, singular invention, StickBot is an idea, a flexible system that can be reconfigured in a variety of ways. A modular robot, StickBot’s components can be added, adjusted, and discarded as needed.
This article features quotes from Michelle Johnson, Associate Professor in Physical Medicine and Rehabilitation in the Perelman School of Medicine and in Bioengineering in the School of Engineering and Applied Sciences, and Director of the Rehabilitation Robotics Lab.
Speaker: Emma Chory, Ph.D.
Postdoctoral Fellow
Sculpting Evolution Laboratory
Massachusetts Institute of Technology
Date: Thursday, October 21, 2021
Time: 3:30-4:30 PM EDT
Zoom – check email for link or contact ksas@seas.upenn.edu
Room: Moore 216
Abstract: Evolution occurs when selective pressures from the environment shape inherited variation over time. Within the laboratory, evolution is commonly used to engineer proteins and RNA, but experimental constraints have limited our ability to reproducibly and reliably explore key factors such as population diversity, the timing of environmental changes, and chance. We developed a high-throughput system for the analytical exploration of molecular evolution using phage-based mutagenesis to evolve many distinct classes of biomolecules simultaneously. In this talk, I will describe the development of our open-source python:robot integration platform which enables us to adjust the stringency of selection in response to real-time evolving activity measurements and to dissect the historical, environmental, and random factors governing biomolecular evolution. Finally, I will talk about our many on-going projects which utilize this system to evolve previously intractable biomolecules using novel small-molecule substrates to target the undruggable proteome.
Emma Chory Bio: Emma Chory is a postdoctoral fellow in the Sculpting Evolution Group at MIT, advised by Kevin Esvelt and Jim Collins. Emma’s research utilizes directed evolution, robotics, and chemical biology to evolve biosynthetic pathways for the synthesis of novel peptide-based therapeutics. Emma obtained her PhD in Chemical Engineering in the laboratory of Gerald Crabtree at Stanford University. She is the recipient of the NSF Graduate Research Fellowship and a pre- and postdoctoral NIH NRSA Fellowship.
The winners of the Medical Robots for Contagious Disease Challenge Award for Best Application (L to R): Yasmina Al Ghadban, Phuong Vu, and Rob Paslaski.
Three recent Penn Bioengineering graduates took home the Best Application Award from the Medical Robotics for Contagious Disease Challenge, part of the three-month Hamlyn Symposium on Medical Robotics. Organized by the Hamlyn Centre at Imperial College, London, UK, in collaboration with the UK-RAS Network, the challenge involved “creating a 2-minute video of robotic or AI technology that could be used to tackle contagious diseases” in response to the current and potential future pandemics. Yasmina Al Ghadban, Rob Paslaski, and Phuong Vu were members of the Penn Bioengineering senior design team rUmVa who designed and built a cost-effective, autonomous robot that can quickly disinfect rooms by intelligently sanitizing high-touch surfaces and the air. The Best Application Award comes with a prize of £5,000.
The full Team rUmVa (L to R): Yasmina Al Ghadban, Rachel Madhogarhia, Phuong Vu, Jeong Inn Park, and Rob Paslaski.
Team rUmVa, which also included Bioengineering seniors Rachel Madhogarhia and Jeong Inn Park, also received a Berkman Opportunity fund grant from Penn Engineering and was one of three teams to win Penn Bioengineering’s Senior Design competition. Senior Design work is conducted every year on-site in the George H. Stephenson Foundation Educational Laboratory & Bio-MakerSpace (which successfully reopened for in-person activities this Spring semester). Read the full list of Spring 2021 Senior Design Award Winners here.
rUmVa and the other challenge winners were honored during the Hamlyn Symposium’s virtual closing ceremony on July 29, 2021.
Read rUmVa’s abstract and final papers, along with those of all of the Penn Bioengineering Teams’, on the BE Labs Senior Design 2021 website. rUmVa’s presentation can be viewed on Youtube:
Each Penn Bioengineering (BE) student’s undergraduate experience culminates in Senior Design, a two-semester capstone project in which student teams conceive, design, and develop a bioengineering project, whether a medical device, molecular biological therapeutic, or research tool. Projects are inherently interdisciplinary, and can involve biomaterials, electronics, mechanics, molecular biology, nanotechnology, and microfluidics. Research and development is supervised by BE faculty, lab staff, and graduate student TA’s and project managers, and work is conducted in the George H. Stephenson Foundation Educational Laboratory & Bio-MakerSpace (which successfully reopened for in-person activities this Spring semester).
This year’s 11 teams included the variety and innovation we’ve come to expect from our outstanding students, ranging from devices which track medical conditions, such afib and POTS, to technology responding to our post-COVID world, such as a disinfecting robot and a kit to make telemedicine more effective. The year finished with presentations to alumni judges, and BE’s annual Demo Day (the only in-person demo day on the engineering campus this year) on April 15, 2021, in which students showcased their designs to faculty.
Several teams were highlighted for awards recognition.
Tula won the Grand Prize Award at the Weiss Tech House Senior Design Pitch competition, sponsored by Penn’s Weiss Tech House, as well as a Berkman Opportunity Fund grant from Penn Engineering. Tula’s members are Bioengineering student Shreya Parchure (BSE 2021 & MSE 2021), Mechanical Engineering student Miriam Glickman (BSE 2021 & MSE 2022), and Computer Science students Ebtihal Jasim (BSE 2021) and Tiffany Tsang (BSE 2021).
TelemedTree (David Alanis Garza, Aurora Cenaj & Raveen Kariyawasam) and rUmVA (Yasmina Al Ghadban, Rachel Madhogarhia, Jeong Inn Park, Robert Paslaski & Phuong Vu) also received Berkman Opportunity Fund grants.
RHO Therapeutics was named a finalist in the Rice 360 Design Competition for 2021 (David Bartolome, Ethan Boyer, Patrisia de Anda, Kelly Feng & Jenny Nguyen).
In addition, three teams won BE’s internal Senior Design competition: IdentiFly (MEAM student Armando Cabrera, ESE student Ethan Chaffee, MEAM student Zachary Lane, ESE student Nicoleta Manu & BE student Abum Okemgbo), OtoAI, and rUmVa.
Short descriptions of each project are below. See each project’s full abstract, final paper, and video presentation here. The full 2021 presentation Youtube playlist is linked below.
reActive is a low-cost wearable device that measures ground reaction force as well as knee angle to aid physical therapists in quantifying an athlete’s recovery from an ACL injury.
EndoMagno is a novel magnetic endoscopy probe that effectively grips metallic objects by interfacing with an endoscope.
NoFib is an at-home wearable for athletes with histories of atrial fibrillation or those recovering from ablation surgeries who wish to continue their workout regimen and track their cardiac recovery without needing to leave their residence.
Tula is a smart compression stocking platform to improve quality of life for people with Postural Orthostatic Tachycardia Syndrome (POTS), a disease which causes fainting upon standing due to blood pooling in legs. Tula can predict a POTS attack through real-time heart rate monitoring and then prevent fainting using dynamic compression.
RHO Therapeutics is a low-cost, wearable glove device that trains fine motor movements using a rehabilitative game that causes motor-mediated flexion and extension of the patient’s hand to aid in chronic stroke rehabilitation.
EarForce aims to monitor fighter pilots’ health during training and in-flight missions via a low-cost headphone system. The device collects physiological data through the ear and is compatible with existing pilot headphone systems.
IdentiFly is a low-cost device which will provide labs with an easy to integrate way to automatically sort fruit flies by sex.
TeleMedTree introduces a new level of telemedicine. It is an affordable precision-focused, at-home diagnostic kit to help immunocompromised individuals with respiratory conditions receive a high quality monitoring of their health that is on par or better than what is possible during an in-person visit.
OtoAI is a novel digital otoscope that enables primary care physicians to take images of the inner ear and leverages machine learning to diagnose abnormal ear pathologies.
Synchro-Sense is a device which detects when patients on ventilators are at maximum inhalation and triggers an X-ray image capture for accuracy.
rUmVa is a cost-effective, autonomous robot that can quickly disinfect rooms by intelligently sanitizing high-touch surfaces and the air.
Every spring, the Graduate Association of Bioengineers (GABE) at Penn partners up with iPraxis, an educational non-profit organization based in Philadelphia, to organize BETA Day, an event that brings together Bioengineering graduate students and local Philadelphia grade school students to introduce them to the field of bioengineering, the life of graduate students, and hands-on scientific demonstrations. Due to COVID-19 restrictions, we adapted the traditional in-person BETA Day into a virtual event on Zoom. This year, we assembled kits containing the necessary materials for our chosen demonstrations and worked with iPraxis to coordinate their delivery to partner schools and their students. This enabled students to perform their demonstrations in a hands-on manner from their own homes; over 40 students were able to participate in extracting their own DNA and making biomaterials with safe household materials.
Michelle Johnson presents on her work in robotics
The day began with a fantastic lecture by Michelle Johnson, Associate Professor in Bioengineering and Physical Medicine and Rehabilitation, who introduced students to the field of rehabilitation robotics and shared her experience as a scientist. Students then learned about DNA and biomaterials through lectures mediated by the graduate students Dayo Adetu and Puneeth Guruprasad. After each lecture, students broke into breakout rooms with graduate student facilitators where they were able to get some hands-on scientific experience as they extracted DNA from their cheek cells and fabricated alginate hydrogels. Michael Sobrepera, a graduate student in Dr. Johnson’s lab, concluded the event by giving a lecture on the process of robotics development and discussed where the field is heading and some important considerations for the field.
Dayo Adetu, Bioengineering Master’s student and GABE President, teaches the students about Genetic Engineering
While yet another online event may seem unexciting, throughout the lectures students remained exceptionally engaged and raised fantastic questions ranging from the accessibility of low income communities to novel robotic therapeutic technologies to the bioethical questions robotic engineers will face as technologies advance. The impact of BETA day was evident as the high school students began to discuss the possible majors they would like to pursue for their bachelor’s degrees. Events like BETA Day give a glimpse into possible STEM fields and careers students can pursue.